


すべての製品
コンタクトパーソン :
Fiona Luo
電話番号 :
+86 18013106371
Whatsapp :
+8618000732351
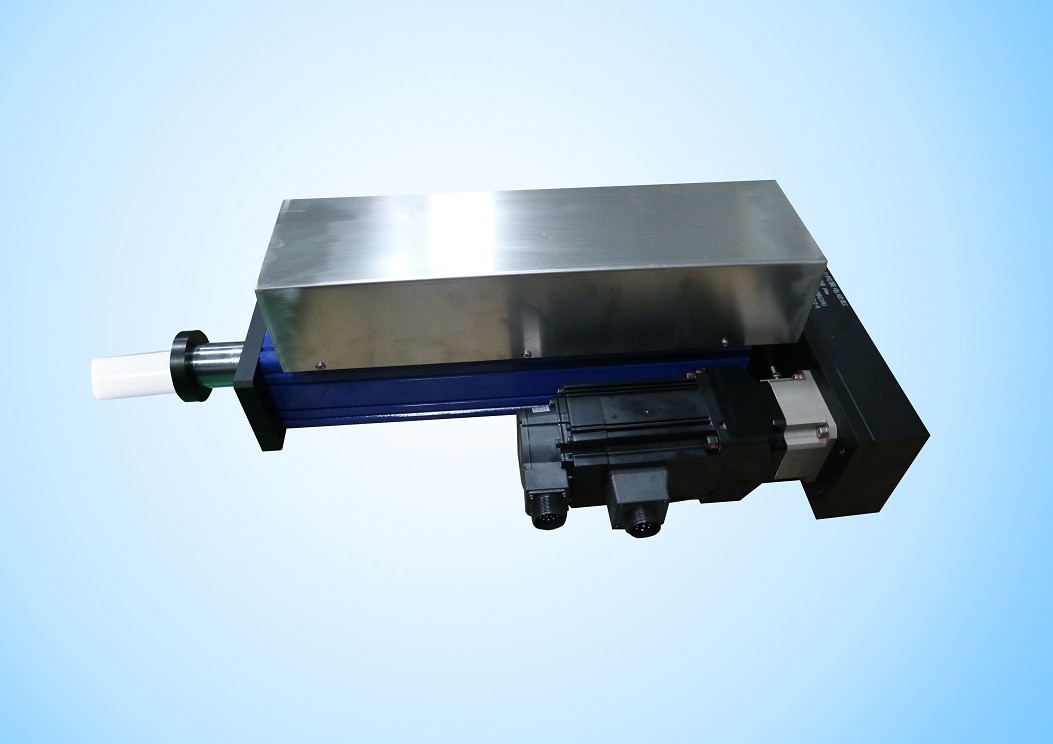
耳障りな定規の電気線形サーボ アクチュエーター、小さいサーボ運転された線形アクチュエーター


| 起源の場所 | 中国 |
|---|---|
| ブランド名 | TJ |
| 証明 | ISO9001:2008,CE |
| モデル番号 | TJER220 |
| 最小注文数量 | 1 pc |
| 価格 | negotiable |
| パッケージの詳細 | 外的なパッキング:カートンか非木箱;クッションのパッキング:EPEの泡 |
| 受渡し時間 | 3-4 週間 |
| 支払条件 | T/Tの先立って30%の支払、配達の前の70% |
| 供給の能力 | 1ヶ月あたりの800 PC |

試供品およびクーポンのための私に連絡しなさい。
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
スカイプ: sales10@aixton.com
心配があれば、私達は24時間のオンライン・ヘルプを提供する。
x商品の詳細
| 材料 | アルミニウム | 色 | 標準:海軍blue&silveryは、他カスタマイズすることができる |
|---|---|---|---|
| 速度 | 200mm/sまで | 反復性 | ±0.01mm |
| 打撃 | 50~2500mm | 出力力 | 200KNまで |
| モーター結合方式 | 線形/平行 | 内部回転拘束 | を使って/外に |
| ねじ鉛 | 10,20mm | 負荷結合方式 | の球のヘッド蝶番男性、女性、U字型ボルトおよびカスタマイズされる |
| ハイライト | 火格子を付ける定規電気シリンダー アクチュエーター,Servoによって運転される電気シリンダー線形アクチュエーター,200 KNのサーボ電気シリンダー |
||
製品の説明
火格子を付ける定規及び排他的制御ソフトウェア、高性能の電気シリンダーが付いている50~2500mmの線形アクチュエーター
1. プロダクト モデル定義
映像..............................................
例:TJER160 S300 B R 05 A.M.C 10 05 0 P11 O/C N/P
|
TJER160シリーズいいえ。
TJER190 TJER220 TJER250 |
タイプを取付けるMシリンダー
M1:二重側面の台紙 M2:側面のturnnionの台紙 M3:前部フランジの台紙 M4:後部フランジの台紙 M5:後部Uリンクの台紙 M6:後部シャフトの台紙 MX:カスタマイズされる |
|
S300有効な打撃
TJER160:50~1500mm TJER190:50~2000mm TJER220:50~2500mm TJER250:50~3000mm |
C —負荷結合方式
C1:男性 C2:女性 C3:U字型ボルト C4:球のヘッド蝶番 CX:カスタマイズされる |
|
Bねじタイプ
B:球ねじ C:ローラーねじ |
10力
01:100W 02:200W 04:400W 08:750W 10:1000W 20:2000W 30:3000W |
|
R反回転
T:なし |
05減少の比率
05:5に1 10:10に1 20:20に1 |
|
05ねじ鉛 TJER190:10,20mm TJER220:10,20mm TJER250:10,20mm |
限界スイッチの2数
(デフォルトはノーマル・オープンNPNスイッチである) |
|
タイプを取付けるモーター B:平行 |
O/C限界スイッチ
O:ノーマル・オープン C:普通近い |
|
タイプのN/P感知
N:NPN P:PNP |
印:
1) 有効な打撃を保障するため、2つの端は保留5mmスペースである必要がある。
2) センサーはモーターの同じ側面に取付けられるモーターが平行のとき取付けることができなかった。
2. 電気シリンダー選択の指導
(1)電気シリンダーのモーター出力トルクと出力力間の関係:
F=T×η×2π×R/L
F:電気シリンダー出力力、単位:Kn
T:モーター出力トルク、単位:Nm
R:縮小率
L:鉛、単位をねじで締めなさい:mm
η:効率(一般に総効率は85%であるが、実際の効率意志のchage、実際の使用状態に基づいている)
(2)電気シリンダー ワーキング・ライフ
電気シリンダーの生命は一般に電気シリンダーねじの内部使用を示す。それは2部に分けることができる:
1)。ねじ疲労生命、それはことができ計算する得る;
次は疲労生命の計算方法である。
L10= (Ca/Fm) 3×L
L10:電気シリンダーの生命、単位:Km
Fm:電気シリンダー、単位の平均負荷:Kn
カリフォルニア:ねじナットの基本的な動的負荷、単位:Kn
(ねじサンプルによって検出することができる)
L:鉛、単位をねじで締めなさい:mm
2)。使用の状態による別の生命、(温度のような、潤滑のタイプを使用して塵は、周期的に頻度、等を加え)。この種類の生命は頻繁に経験から引出される。
(3)平均負荷の計算
平均負荷の平均:立方体の平均値は力、速度、働く周期の間の異なった仕事域の時間に従って計算される。
電気シリンダーの負荷の変更
下記に示されているように:
(1)電気シリンダーのモーター出力トルクと出力力間の関係:
F=T×η×2π×R/L
F:電気シリンダー出力力、単位:Kn
T:モーター出力トルク、単位:Nm
R:縮小率
L:鉛、単位をねじで締めなさい:mm
η:効率(一般に総効率は85%であるが、実際の効率意志のchage、実際の使用状態に基づいている)
(2)電気シリンダー ワーキング・ライフ
電気シリンダーの生命は一般に電気シリンダーねじの内部使用を示す。それは2部に分けることができる:
1)。ねじ疲労生命、それはことができ計算する得る;
次は疲労生命の計算方法である。
L10= (Ca/Fm) 3×L
L10:電気シリンダーの生命、単位:Km
Fm:電気シリンダー、単位の平均負荷:Kn
カリフォルニア:ねじナットの基本的な動的負荷、単位:Kn
(ねじサンプルによって検出することができる)
L:鉛、単位をねじで締めなさい:mm
2)。使用の状態による別の生命、(温度のような、潤滑のタイプを使用して塵は、周期的に頻度、等を加え)。この種類の生命は頻繁に経験から引出される。
(3)平均負荷の計算
平均負荷の平均:立方体の平均値は力、速度、働く周期の間の異なった仕事域の時間に従って計算される。
電気シリンダーの負荷の変更
下記に示されているように:
![]()
電気シリンダーの平均負荷は次の通り計算される:

(3)電気サーボ シリンダー ドライブ トルクおよび力の選択のテーブル
| モーター関係 | 平行(ベルト) | ||||||||||||||||||
| 縮小率 | 1 | 1.5 | 5 | 10 | 20 | ||||||||||||||
| ねじ鉛 | [mm] | 10 | |||||||||||||||||
| モーター力 | [KW] | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | |||
| モーター評価されるトルク | [N.M] | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | |||
| モーター定格速度 | [r/min] | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | |||
| シリンダー評価される力 | [KN] | 9.25 | 14.56 | 19.84 | 13.88 | 21.84 | 29.76 | 27.75 | 43.68 | 59.52 | 46.26 | 72.8 | 99.2 | 92.51 | 145.6 | 150 | |||
| 最高シリンダー。力 | [KN] | 200 | |||||||||||||||||
| シリンダー速度 | [mm/s] | 0-200 | 0-200 | 0-65 | 0-30 | 0-15 | |||||||||||||
| モーター関係 | 線形(連結のディレクト・ドライブ) | |||||||||||||||||||
| 縮小率 | 1 | 1.5 | 5 | 10 | 20 | |||||||||||||||
| ねじ鉛 | [mm] | 10 | ||||||||||||||||||
| モーター力 | [KW] | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | |||||||
| モーター評価されるトルク | [N.M] | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | |||||||
| モーター定格速度 | [r/min] | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | |||||||
| シリンダー評価される力 | [KN] | 9.25 | 14.56 | 19.84 | 27.75 | 43.68 | 59.52 | 46.26 | 72.8 | 99.2 | 92.51 | 145.6 | 150 | |||||||
| 最高シリンダー。力 | [KN] | 200 | ||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-200 | 0-65 | 0-30 | 0-15 | |||||||||||||||
| モーター関係 | 平行(ベルト) | ||||||||||||||||||
| 縮小率 | 1 | 1.5 | 5 | 10 | 20 | ||||||||||||||
| ねじ鉛 | [mm] | 20 | |||||||||||||||||
| モーター力 | [KW] | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | |||
| モーター評価されるトルク | [N.M] | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | |||
| モーター定格速度 | [r/min] | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | |||
| シリンダー評価される力 | [KN] | 4.63 | 7.27 | 9.92 | 6.94 | 10.91 | 14.88 | 13.88 | 21.82 | 29.75 | 23.13 | 36.36 | 49.59 | 46.26 | 72.72 | 99.18 | |||
| 最高シリンダー。力 | [KN] | 200 | |||||||||||||||||
| シリンダー速度 | [mm/s] | 0-200 | 0-200 | 0-130 | 0-65 | 0-30 | |||||||||||||
| モーター関係 | 線形(連結のディレクト・ドライブ) | |||||||||||||||||||
| 縮小率 | 1 | 1.5 | 5 | 10 | 20 | |||||||||||||||
| ねじ鉛 | [mm] | 20 | ||||||||||||||||||
| モーター力 | [KW] | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | 3.5 | 5.5 | 7.5 | ||||
| モーター評価されるトルク | [N.M] | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | 16.7 | 26.25 | 35.81 | ||||
| モーター定格速度 | [r/min] | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | 2000年 | ||||
| シリンダー評価される力 | [KN] | 4.63 | 7.27 | 9.92 | 6.94 | 10.91 | 14.88 | 13.88 | 21.82 | 29.75 | 23.13 | 36.36 | 49.59 | 46.26 | 72.72 | 99.18 | ||||
| 最高シリンダー。力 | [KN] | 200 | ||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-200 | 0-130 | 0-65 | 0-30 | |||||||||||||||
3. 適用
★の軍装置:ロケット燃料のレーダー、ミサイルの建設者、装甲車両の振動プラットホーム、特別な装置および他の軍艦および航空機ハッチ、開始、シート高の調節、武器の能力別クラス編成制度、アクチュエーター、実験持ち上がるサポート、タンク ミサイル発射機の高低の方向行為の調節、押し、炉のドアの開始、等。
★の特別な装置:産業オートメーションの生産ライン、一貫作業、兵站学伝達、持ち上がるプラットホーム、オフセット制御、弁制御、等位のマニピュレーター、機械設備CT Kamaのナイフ、食糧および薬の企業、CNCの工作機械、企業の包装機械、自動車電子出版物、織物装置のウィンド マシーン インデクシングは、ポジション・コントロール死に、置くあくこと締め金で止める。
★の実験装置:シミュレーションのプラットホーム、テスト ベッド、波機械、試験装置等。
このタイプは特に適しているのために:
サーボ押すこと、モーター組立部品の生産ラインおよびあなたはまた私達のサーボ押すソフトウェアを一緒に購入できる。
映像...................................
推薦されたプロダクト