


すべての製品
コンタクトパーソン :
Fiona Luo
電話番号 :
+86 18013106371
Whatsapp :
+8618000732351
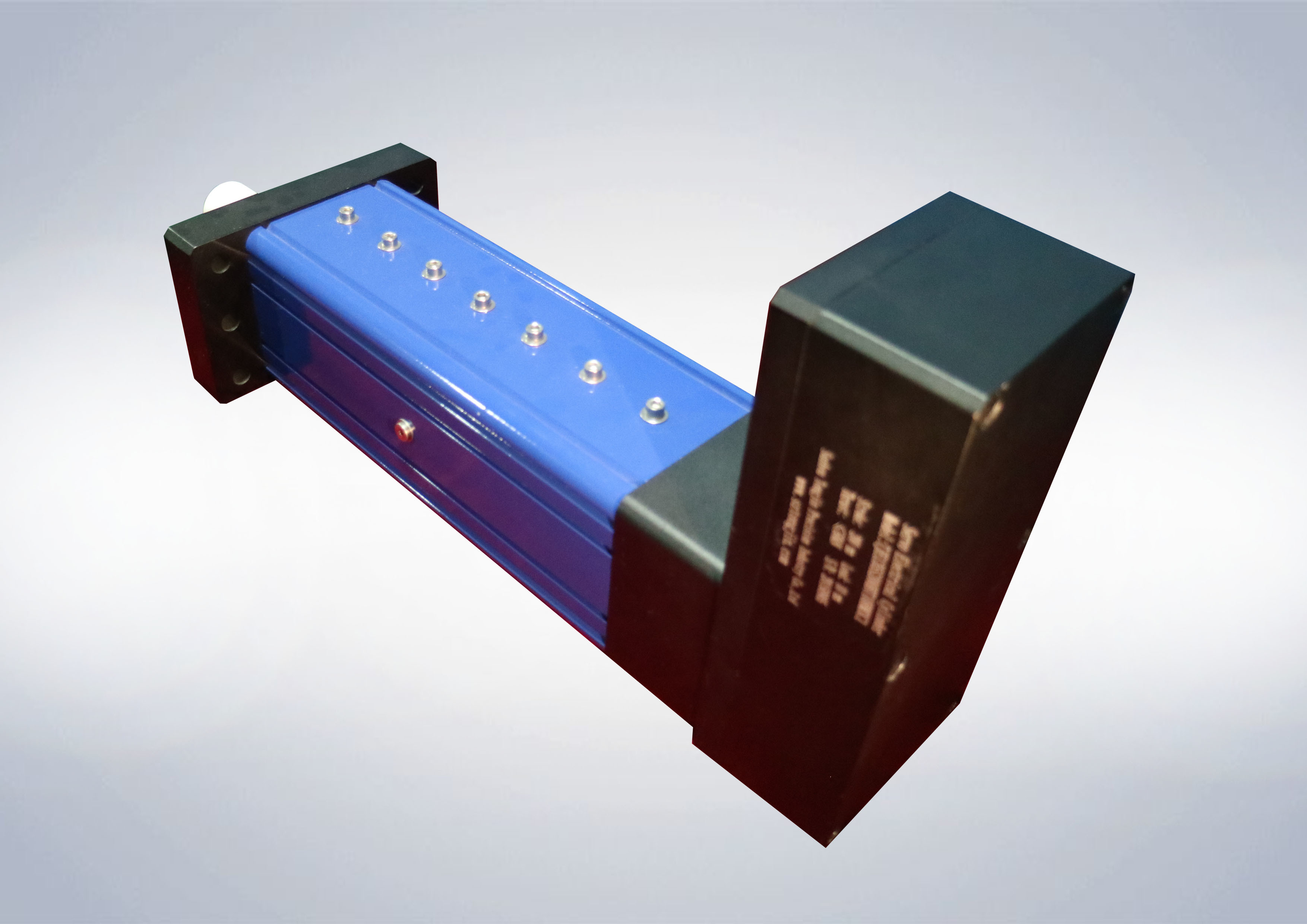
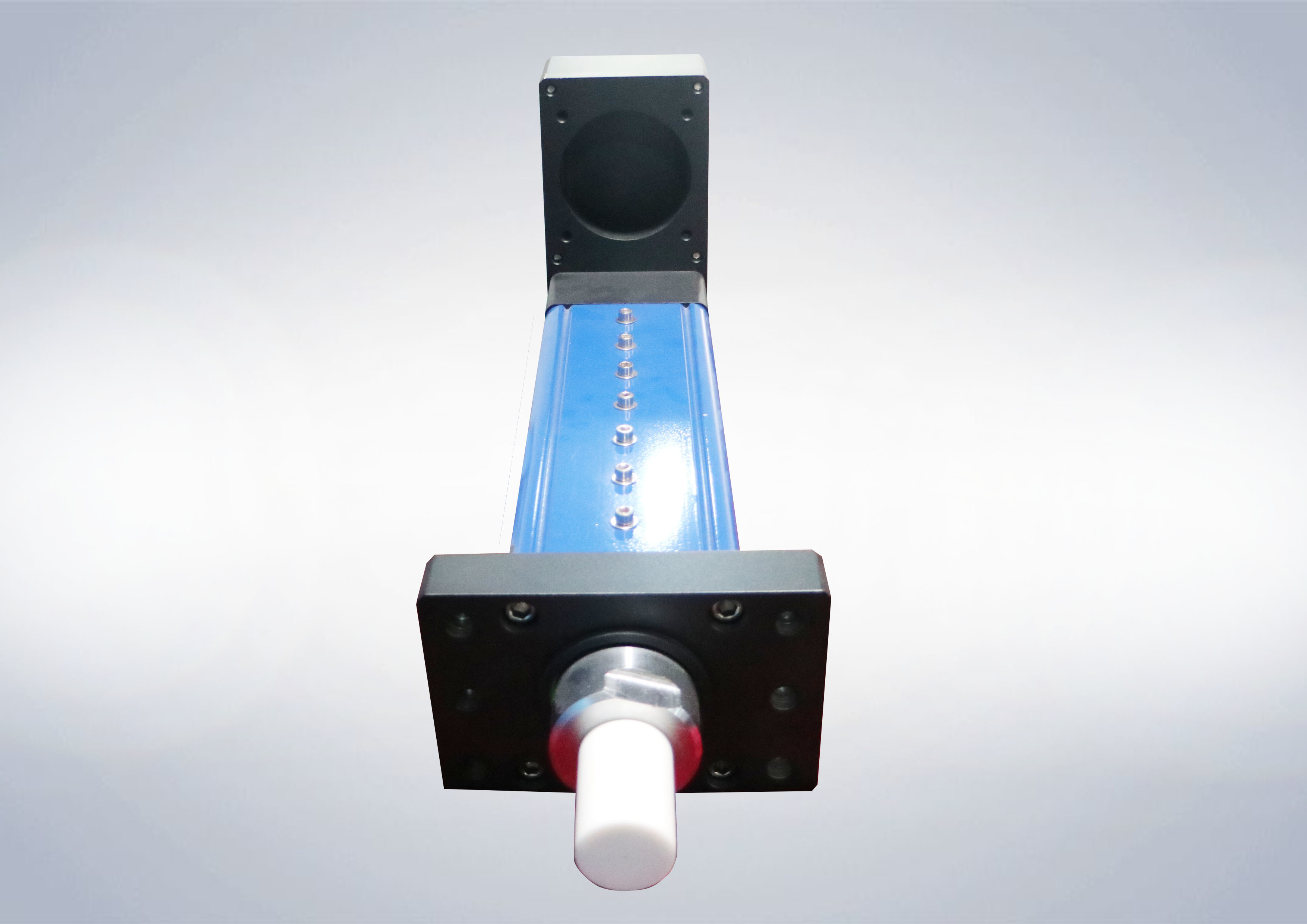
ダイレクト接続電気シリンダー線形アクチュエーター/球ねじ青く小さい電気シリンダー





| 起源の場所 | 中国 |
|---|---|
| ブランド名 | TJ |
| 証明 | ISO9001:2008,CE |
| モデル番号 | TJE135 |
| 最小注文数量 | 1 pc |
| 価格 | negotiable |
| パッケージの詳細 | 外的なパッキング:カートンか非木箱;クッションのパッキング:EPEの泡 |
| 受渡し時間 | 3-4 週間 |
| 支払条件 | T/Tの先立って30%の支払、配達の前の70% |
| 供給の能力 | 1ヶ月あたりの800 PC |

試供品およびクーポンのための私に連絡しなさい。
Whatsapp:0086 18588475571
Wechat: 0086 18588475571
スカイプ: sales10@aixton.com
心配があれば、私達は24時間のオンライン・ヘルプを提供する。
x商品の詳細
| 材料 | アルミニウム | 色 | 標準:海軍blue&silveryは、他カスタマイズすることができる |
|---|---|---|---|
| 速度 | 500mm/sまで | 反復性 | ±0.01mm |
| 打撃 | 50〜1200mm | 出力力 | 50KNまで |
| モーター結合方式 | 線形/平行 | 内部回転拘束 | を使って/外に |
| ねじ鉛 | 10,20,50mm | 負荷結合方式 | の球のヘッド蝶番男性、女性、U字型ボルトおよびカスタマイズされる |
| ハイライト | 電気シリンダー線形アクチュエーター500mm/s,ダイレクト接続の線形サーボ アクチュエーター,ダイレクト接続電気シリンダー線形アクチュエーター |
||
製品の説明
50~1200mmのダイレクト接続/ベルトの関係のServoの電気シリンダー、美しく、軽いアルミ合金材料
1. 電気サーボ シリンダー ドライブ トルクおよび力の選択のテーブル
| モーター関係 | 平行(ベルト) | |||||||||||||||||||||||
| 縮小率 | 1 | 1.5 | 3 | 5 | 10 | |||||||||||||||||||
| ねじ鉛 | [mm] | 10 | ||||||||||||||||||||||
| モーター力 | [KW] | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | ||||||||
| モーター評価されるトルク | [N.M] | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | ||||||||
| モーター定格速度 | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||||
| シリンダー評価される力 | [KN] | 3.30 | 4.85 | 6.62 | 4.96 | 7.28 | 9.92 | 9.91 | 14.55 | 19.85 | 16.52 | 24.26 | 30 | 30 | 30 | 30 | ||||||||
| 最高シリンダー。力 | [KN] | 50 | ||||||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-500 | 0-330 | 0-330 | 0-220 | 0-165 | 0-110 | 0-100 | 0-65 | 0-100 | 0-30 | |||||||||||||
| モーター関係 | 線形(連結のディレクト・ドライブ) | ||||||||||||||||||||||||
| 縮小率 | 1 | 1.5 | 3 | 5 | 10 | ||||||||||||||||||||
| ねじ鉛 | [mm] | 10 | |||||||||||||||||||||||
| モーター力 | [KW] | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | 1.5 | 2.2 | 3 | ||||||||||||
| モーター評価されるトルク | [N.M] | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | 4.77 | 7 | 9.55 | ||||||||||||
| モーター定格速度 | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||||||||
| シリンダー評価される力 | [KN] | 3.30 | 4.85 | 6.62 | 9.91 | 14.55 | 19.85 | 16.52 | 24.26 | 30 | 30 | 30 | 30 | ||||||||||||
| 最高シリンダー。力 | [KN] | 50 | |||||||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-500 | 0-330 | 0-110 | 0-100 | 0-65 | 0-100 | 0-30 | |||||||||||||||||
| モーター関係 | 平行(ベルト) | ||||||||||||||||||||||
| 縮小率 | 1 | 1.5 | 3 | 5 | 10 | ||||||||||||||||||
| ねじ鉛 | [mm] | 20 | |||||||||||||||||||||
| モーター力 | [KW] | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | |||||||
| モーター評価されるトルク | [N.M] | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | |||||||
| モーター定格速度 | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||
| シリンダー評価される力 | [KN] | 2.65 | 4.65 | 7.27 | 3.97 | 6.97 | 10.91 | 7.94 | 13.94 | 21.82 | 13.23 | 23.23 | 36.36 | 26.46 | 46.45 | 50 | |||||||
| 最高シリンダー。力 | [KN] | 50 | |||||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-500 | 0-500 | 0-444 | 0-330 | 0-220 | 0-200 | 0-130 | 0-100 | 0-65 | |||||||||||||
| モーター関係 | 線形(連結のディレクト・ドライブ) | |||||||||||||||||||||||
| 縮小率 | 1 | 1.5 | 3 | 5 | 10 | |||||||||||||||||||
| ねじ鉛 | [mm] | 20 | ||||||||||||||||||||||
| モーター力 | [KW] | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | |||||||||||
| モーター評価されるトルク | [N.M] | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | |||||||||||
| モーター定格速度 | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||||
| シリンダー評価される力 | [KN] | 2.65 | 4.65 | 7.27 | 7.94 | 13.94 | 21.82 | 13.23 | 23.23 | 36.36 | 26.46 | 46.45 | 50 | |||||||||||
| 最高シリンダー。力 | [KN] | 50 | ||||||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-500 | 0-330 | 0-220 | 0-200 | 0-130 | 0-100 | 0-65 | ||||||||||||||||
| モーター関係 | 平行(ベルト) | ||||||||||||||||||||
| 縮小率 | 1 | 1.5 | 3 | 5 | 10 | ||||||||||||||||
| ねじ鉛 | [mm] | 50 | |||||||||||||||||||
| モーター力 | [KW] | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | |||||
| モーター評価されるトルク | [N.M] | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | |||||
| モーター定格速度 | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||
| シリンダー評価される力 | [KN] | 1.06 | 1.85 | 2.91 | 1.59 | 2.78 | 4.37 | 3.17 | 5.56 | 8.73 | 5.29 | 9.26 | 14.56 | 10.58 | 18.52 | 29.11 | |||||
| 最高シリンダー。力 | [KN] | 50 | |||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-500 | 0-500 | 0-500 | 0-500 | 0-330 | 0-250 | 0-165 | |||||||||||||
| モーター関係 | 線形(連結のディレクト・ドライブ) | |||||||||||||||||||||
| 縮小率 | 1 | 1.5 | 3 | 5 | 10 | |||||||||||||||||
| ねじ鉛 | [mm] | 50 | ||||||||||||||||||||
| モーター力 | [KW] | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | 3 | 3.5 | 5.5 | |||||||||
| モーター評価されるトルク | [N.M] | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | 9.55 | 16.7 | 26.25 | |||||||||
| モーター定格速度 | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||
| シリンダー評価される力 | [KN] | 2.65 | 4.65 | 7.27 | 7.94 | 13.94 | 21.82 | 13.23 | 23.23 | 36.36 | 26.46 | 46.45 | 50 | |||||||||
| 最高シリンダー。力 | [KN] | 50 | ||||||||||||||||||||
| シリンダー速度 | [mm/s] | 0-500 | 0-500 | 0-500 | 0-330 | 0-250 | 0-165 | |||||||||||||||
3. 周辺部品表
| 名前 | 説明 |
| 1- HNC/CRHNCのフィートの土台の部品 | モーターが取付けられたparall時、この部分は軸受けおよび減力剤のエンド キャップを取付けるために使用される。 |
| 2- FNC/CRFNGのフランジの土台の部品 | モーターが取付けられたparall時、この部分は軸受けおよび減力剤のエンド キャップを取付けるために使用される。 |
| 3- ZNCF/CRZNGのトラニオンの土台の部品 | モーターが取付けられたparall時、この部分は軸受けおよび減力剤のエンド キャップを取付けるために使用される。 |
| 4- LNZG/CRLNZGのトラニオン軸受け | シリンダ ブロックに取付けられるトラニオンのため。 |
| 5- SNCの倍のUリンク軸受け | モーターのために平行を取付けた。 |
| 6- LSNGの球形の蝶番のUリンク軸受け | モーターのために球形軸受けとの平行を、取付けた。 |
| 7- LSNSGの球形の蝶番のUリンク軸受け | モーターのために平行を、統合を溶接していて球形軸受けが取付けた。 |
| 8- SNCSの倍のUリンクの土台の部品 | モーターのために球形軸受けとの平行を、取付けた。 |
| 9- LBGの倍のUリンク軸受け | モーターのために球形軸受けとの平行を、取付けた。 |
| aJ-二重Uリンクの土台の部品 | モーターのために平行を取付けた。 |
| aA-倍のUリンクの土台の部品 | モーターのために球形軸受けとの平行を、取付けた。 |
| aB-倍のUリンクの土台の部品 | モーターのために平行を取付けた。 |
| AC Uリンク軸受け | モーターのために平行を取付けた。 |
| 広告の球形の蝶番のUリンク軸受け | モーターのために球形軸受けとの平行を、取付けた。 |
| aE-トラニオン軸受け | シリンダーの位置への取付けのため。モーターが取付けられた平行、取付け位置はモーターに近づいてもよい。 |
| aF-フィートの土台の部品 | モーターのために軸方向に取付けた。 |
| aG-接合箇所軸受け | 球形軸受けを使って。 |
| ああ接続のフランジ | 放射状の偏差を償うため。 |
| aI-倍のUリンク | 平面のシリンダー振動のため。 |
| bJ-関係の一部には自己 | 放射状および角の偏差を償うため。 |
| Baの直角の球形の蝶番のUリンク軸受け | 共同軸受けのため。 |
| bB-の二重Uリンク | シリンダー振動取付けのため。 |
| 紀元前に指導の単位 | シリンダーが高いトルクの下でねじれることを防ぎなさい |
| bD-近さスイッチ | 位置をテストするために、センサーの土台スロットで統合することができる。 |
| スロット カバーはある | 塵が入ることを防ぐため。 |
| bF-平行設置部品 | モーターのために平行を取付けた。 |
| bG-軸設置部品 | モーターのために軸方向に取付けた。 |
4. 適用
★の軍装置:ロケット燃料のレーダー、ミサイルの建設者、装甲車両の振動プラットホーム、特別な装置および他の軍艦および航空機ハッチ、開始、シート高の調節、武器の能力別クラス編成制度、アクチュエーター、実験持ち上がるサポート、タンク ミサイル発射機の高低の方向行為の調節、押し、炉のドアの開始、等。
★の特別な装置:産業オートメーションの生産ライン、一貫作業、兵站学伝達、持ち上がるプラットホーム、オフセット制御、弁制御、等位のマニピュレーター、機械設備CT Kamaのナイフ、食糧および薬の企業、CNCの工作機械、企業の包装機械、自動車電子出版物、織物装置のウィンド マシーン インデクシングは、ポジション・コントロール死に、置くあくこと締め金で止める。
★の実験装置:シミュレーションのプラットホーム、テスト ベッド、波機械、試験装置等。
このタイプは特に適しているのために:
サーボ押すこと、モーター組立部品の生産ラインおよびあなたはまた私達のサーボ押すソフトウェアを一緒に購入できる。
![]()
![]()
推薦されたプロダクト